2013国际空中机器人大赛(亚太赛区)在清华大学举行
清华代表队率先完成第六代任务 获“最佳任务完成奖”
清华新闻网8月5日电(记者 程曦)8月2日~4日,2013国际空中机器人大赛(亚太赛区)在清华举行。清华大学THRONE代表队的空中机器人表现“抢眼”,率先完成自2010年以来尚未有参赛队挑战成功的第六代任务,荣获此次比赛亚太赛区的“最佳任务完成奖”。
国际空中机器人大赛(International Aerial Robotics Competition,IARC)始创于1991年,由著名机器人学家、佐治亚理工学院教授Robert C. Michelson发起,由国际无人系统协会(Association for Unmanned Vehicle Systems International,AUVSI)举办并赞助。2012年,该项赛事首次在中国设立亚太赛区,与美国赛区赛程一致,依据共同规则进行评分,最终产生获奖队伍。
2013年,共有12支代表队参加了国际空中机器人大赛(亚太赛区)第二届比赛的角逐。其中既有清华大学、北京航空航天大学、南京航空航天大学、浙江大学、厦门大学、西北工业大学、哈尔滨工程大学、中国民航大学、东北大学、海军航空工程学院等国内名校,也首次吸引到两所国外大学——卡塔尔大学和印度斯坦理工大学的队伍参赛。
比赛包括室内研讨、技术答辩、静态评判、现场比赛等环节,三天时间里,各参赛队进行了飞行器设计、精确导航、自主控制等方面的精彩展示。

图为清华大学代表队队员在为无人机起飞做准备。谭树龙 摄
国际空中机器人大赛最突出的特点是需要空中机器人自主完成任务,具有很强的挑战性和趣味性,目前已经历了六代任务。自2010年开始的第六代任务设置了一个“反恐”场景:一份拟破坏全球安全的机密计划书藏匿于位于某偏远小镇的一个安全机构中,潜伏特工已经侦测到该机构有一个安全缺口,计划用一架小型自主飞行器潜入该机构核心部位,窃取相关机密信息,阻止恐怖分子的破坏行动。要想顺利完成任务,参赛队的小型自主飞行器必须在10分钟内完成秘密潜入、搜索房间、寻找并调换U盘以及秘密撤退的全过程,难度非常大。

图为清华大学代表队的无人机携带U盘成功逃离窗口的瞬间。谭树龙 摄
清华大学THRONE代表队的空中机器人在这次比赛中展现出“强大实力”。8月3日下午,比赛刚刚进入到第2轮,当不少参赛队还在努力尝试控制飞行器姿态、躲过障碍物和警报进入房间时,清华代表队的空中机器人就直接通过自主飞行顺利“潜入”。在走廊与房间中自如转向、穿行,迅速识别到目标房间,进入后锁定放置U盘的桌子,下降,精确地抓住U盘并调换以假U盘,顺利飞出,盘旋落地。成功了!现场一片沸腾。这是4年来两个赛区中第一支完成任务的队伍!
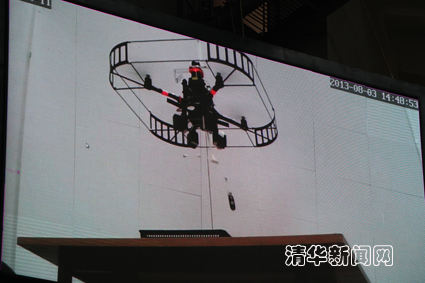
图为现场大屏幕显示清华大学代表队的无人机在大赛第二轮比赛中成功潜入目标房间并顺利抓取U盘的情景。谭树龙 摄
在8月4日下午的最后一轮比赛中,任务难度进一步加大,U盘被放置在一个套间的里间中,这是难度最大的一个场景。勇于尝试的清华代表队这次更换了一个搜索效率更高的新策略,几番艰难的寻觅后,他们再次成功抓取并更换了U盘。虽然最后由于超时和能源耗尽未能再次完成任务,但他们的精彩表现依然赢得在场专家、观众和兄弟院校代表队的热烈掌声。

图为清华大学代表队队员庆祝成功的热烈场面。谭树龙 摄
国际无人系统协会基金会执行主任Daryl Davidson第一时间表达了对清华代表队的祝贺。他表示,清华的队员们一次又一次做到了赛前大家认为可能无法完成的事,这是非凡的成绩,给人留下了极为深刻的印象。
清华代表队最终以优异表现获得了此次比赛亚太赛区的“最佳任务完成奖”(Best Mission Completion Award)和“最佳静态展示奖”(Best Static Judging Presentation Award)。由于今年美国赛区的比赛将于稍晚些时候的8月5日~8月8日举行,最终的大奖归属还要等待美国赛区参赛队的表现。

图为在主楼前区的空中机器人精彩表演。石加东 摄
2013国际空中机器人大赛(亚太赛区)由中国航空学会导航、制导与控制分会和飞行器控制一体化技术重点实验室主办,清华大学和中航工业西安飞行自动控制研究所承办,中国航空学会、北京航空航天大学、中航工业沈阳飞机设计研究所、中航工业西安航空计算机技术研究所协办。

图为在主楼前区的空中机器人精彩表演。石加东 摄
国际无人系统协会基金会执行主任Daryl Davidson,中国航空学会理事长刘高倬,中国航空学会导航、制导与控制分会名誉主任委员、中航工业西安飞行自动控制研究所副总设计师张汝麟等出席了比赛开幕式。清华大学党委副书记韩景阳在开幕式致辞中表示,国际空中机器人大赛兼顾技术难度和趣味性,以问题驱动的方式将前沿技术转化为现实,这种方式有助于培养青年学生的创新思维和实践动手能力,这也正是未来科技人才所必需的能力。
作为比赛东道主,清华大学在推动参赛高校交流和科学普及方面作出了不少努力。例如在赛前举行飞行控制技术论坛,邀请专家介绍本领域前沿动态;将比赛的静态展示环节拓展为公开交流展示的形式,同时引入编队飞行表演,吸引更多科学爱好者观摩等。首次参赛的印度斯坦理工大学队长Muhammed Rizwan表示,能够参与这样的国际高水平赛事是一项荣誉,参赛的主要目的不是获胜,而是团队合作和分享。Rizwan特别感谢清华的组织者和志愿者给予他们无微不至的帮助和支持,使他们在参赛的同时收获了难忘的友谊。
相关链接:
国际空中机器人大赛历次任务:
国际空中机器人大赛最突出的特点是需要空中机器人在无人干预下自主完成任务,具有很强的挑战性和趣味性。目前已经历了六代任务。第一代任务要求空中机器人完全自主地将金属圆盘从赛场一侧移到另一侧,1995年由美国斯坦福大学完成。第二代任务模拟一个核生化废弃物现场,场内凌乱摆放5个半埋的废料桶,空中机器人需搜索该区域,根据桶上的标志识别桶内物品,并取回一个标志,1997年由卡耐基梅隆大学完成。第三代任务要求空中机器人完全自主地飞到灾害现场,从建筑废墟中搜索生还者,2000年由德国柏林理工大学完成。第四代任务构思了3个极富故事性的场景——救援人质、核电厂抢险、古墓夺宝,为抢救珍贵资料,派遣空中机器人运送任务机器人进入古墓,拍摄挂毯内容并传回照片,2008年由几个队分别完成。第五代任务延续上任务中的第二个场景,一个自主控制的机器人接近一个尚未关闭的反应堆,并派出一架小型自主子飞行器进入反应堆控制室,拍下主控制仪表盘和开关的照片并传送给远处的专家,2009年由美国麻省理工学院完成。2010年起进入第六代任务,背景是潜伏于某情报机构的特工称一份拟破坏全球安全的机密计划书藏匿于位于某偏远小镇的一个安全机构中,该特工已经侦测到该机构有一个安全缺口,计划用一架小型自主飞行器潜入该机构核心部位,窃取相关机密信息,阻止恐怖分子的破坏行动。
清华大学THRONE代表队介绍:
在清华自动化系承担的973项目和清华信息科学与技术国家实验室(筹)重点创新研究团队项目的支持下,戴琼海教授、周东华教授、钟宜生教授和张涛教授等领导的团队开展无人机视觉导航研究,取得了重要进展。
在戴琼海教授的带领下,THRONE代表队成立于2012年5月,队长为自动化系博士后李一鹏。在2012年IARC比赛中,THRONE代表队获得亚太赛区“最佳系统控制奖”,其自主飞行能力在参赛的全球两个赛区的21支队伍中(13所国外大学、8所国内大学)排名第四。
本届比赛清华的参赛队伍由来自自动化系和钱学森力学班的15人组成,包括博士后3人、硕士生4人、本科生8人。借鉴整个团队在视觉导航理论研究上的突出成果,THRONE代表队的无人机室内自定位精度达到厘米级别,在未知环境探索和建模及控制方面均获得了重要的技术突破。
本次参赛的THRONE四旋翼飞行器实现了未知室内环境增量式实时建模(刷新率40赫兹,精度5厘米)、高精度飞行器控制(控制精度3厘米)、高效未知环境路径规划以及U盘抓取装置设计。
编辑:襄桦











